IAS-Lab, University of Padova
Davide Allegro
Postdoctoral researcher in Computer Vision and Robotics
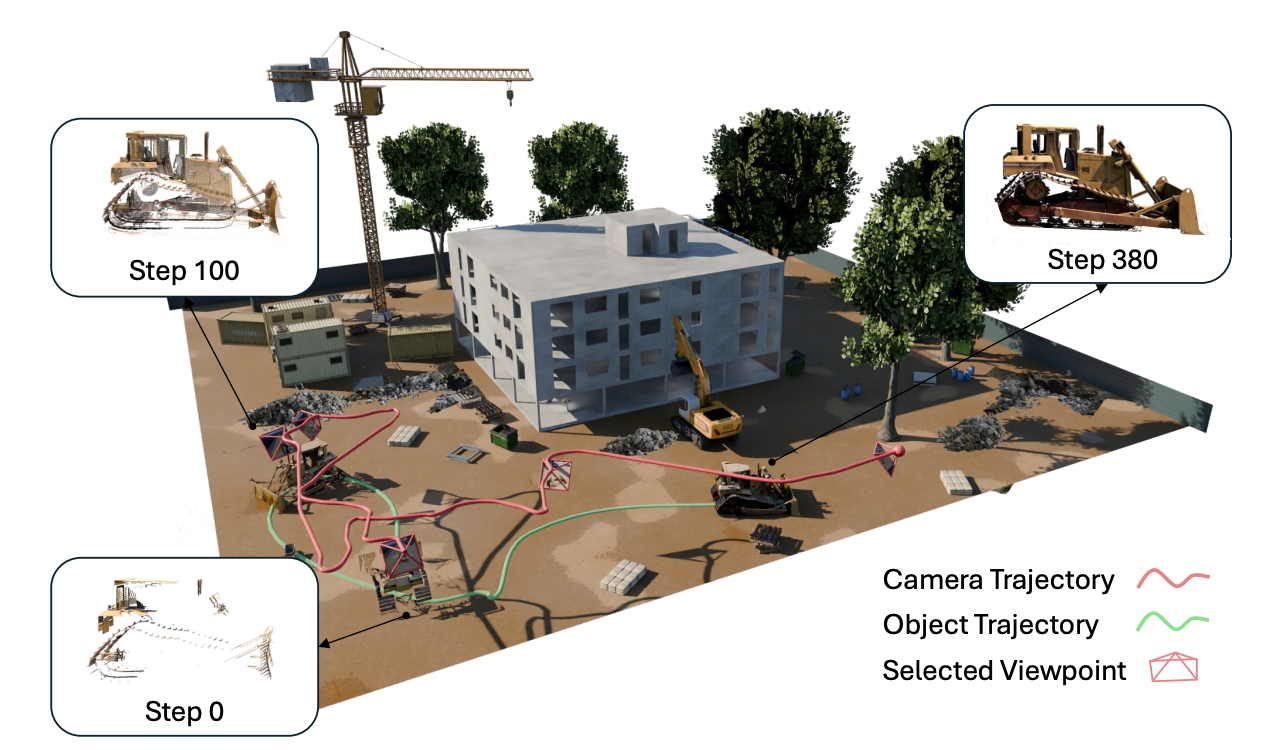
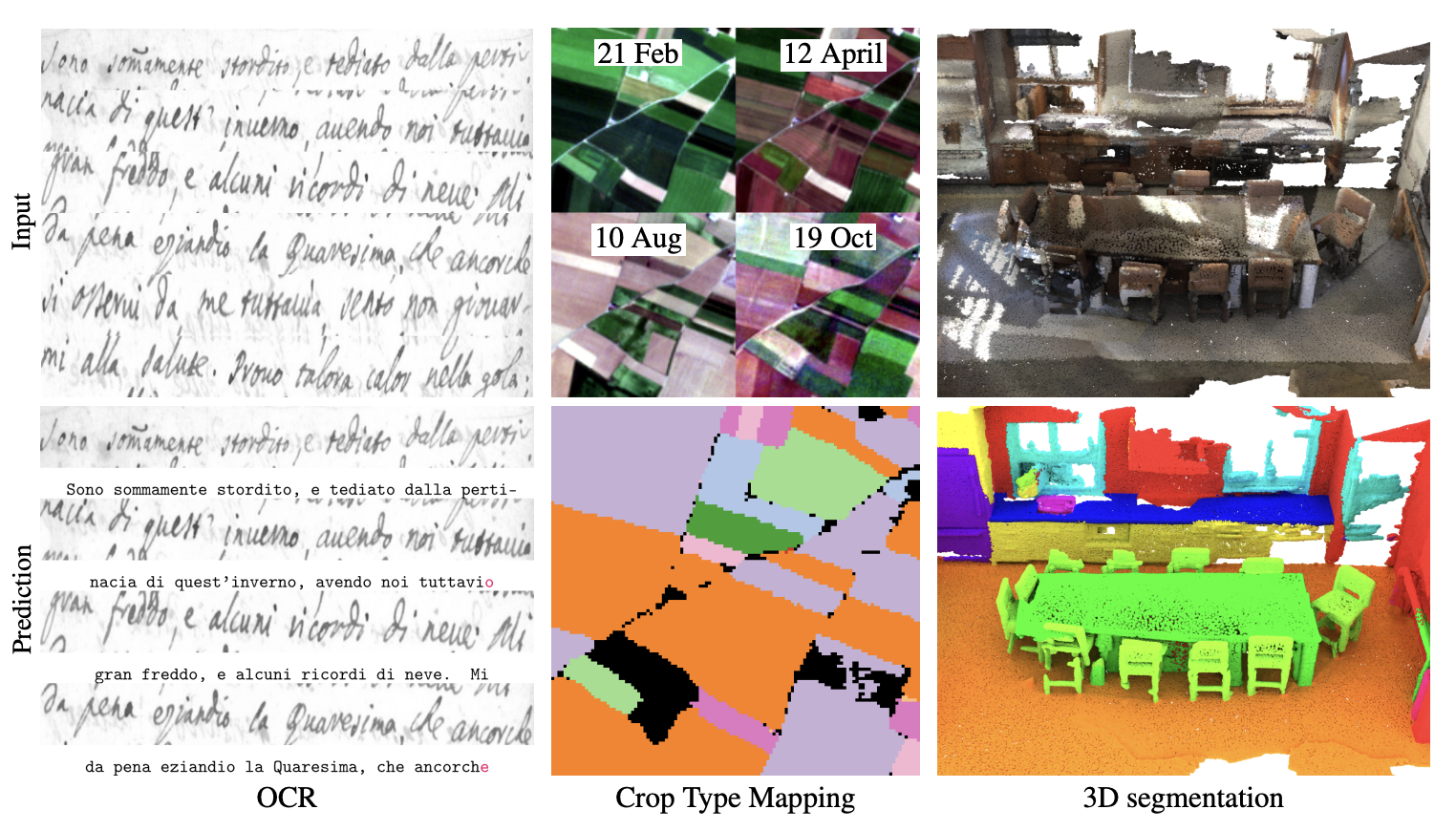
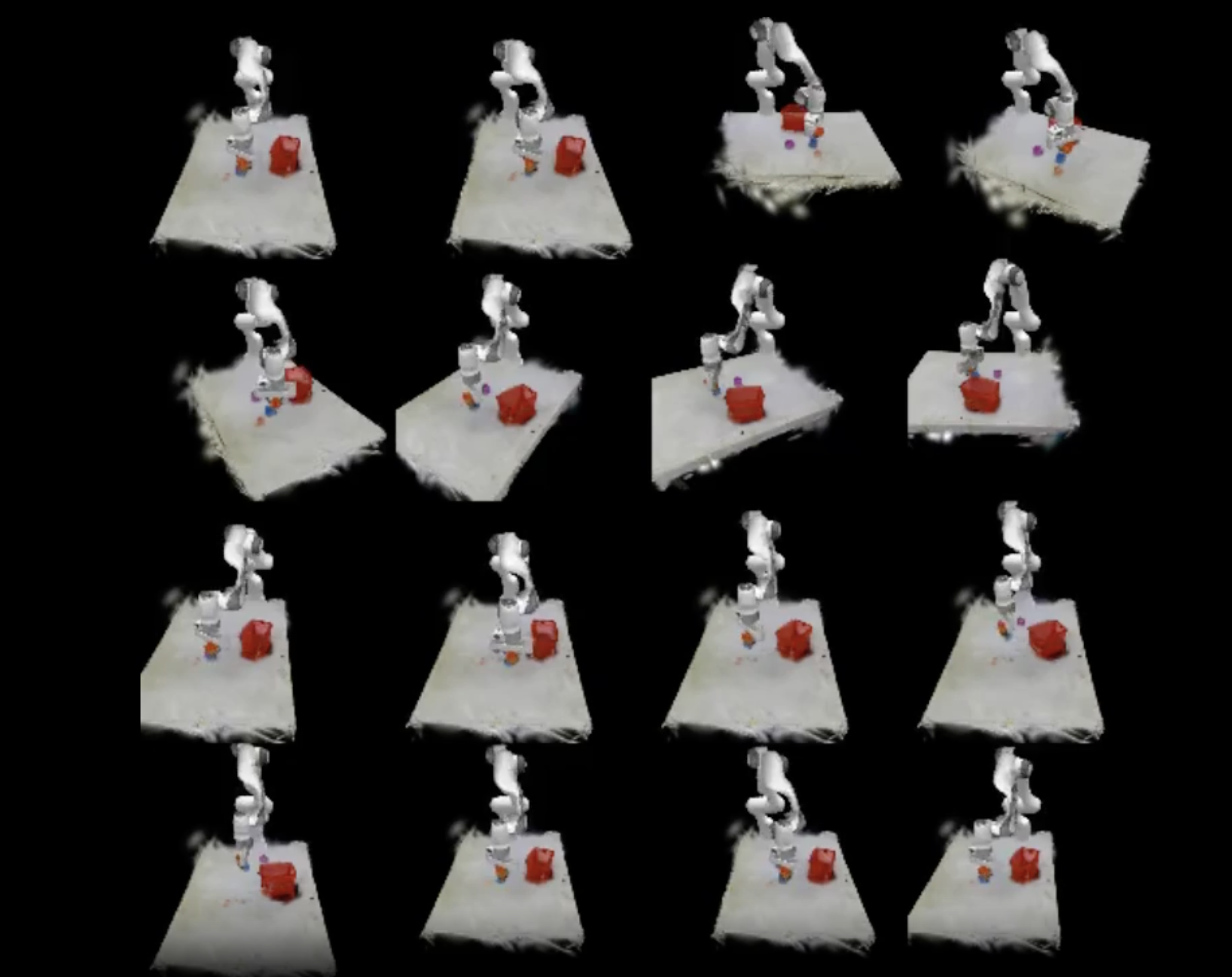
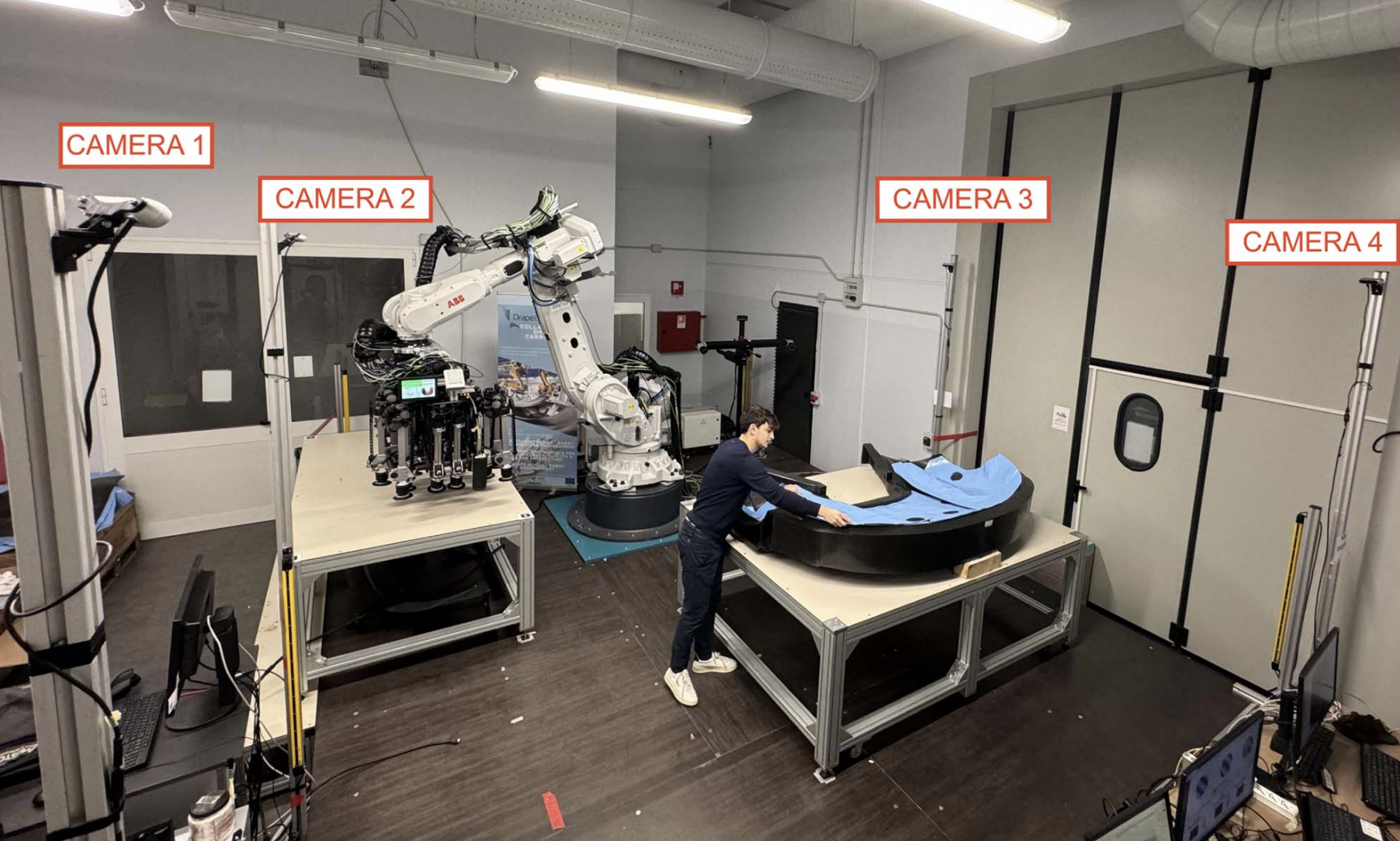
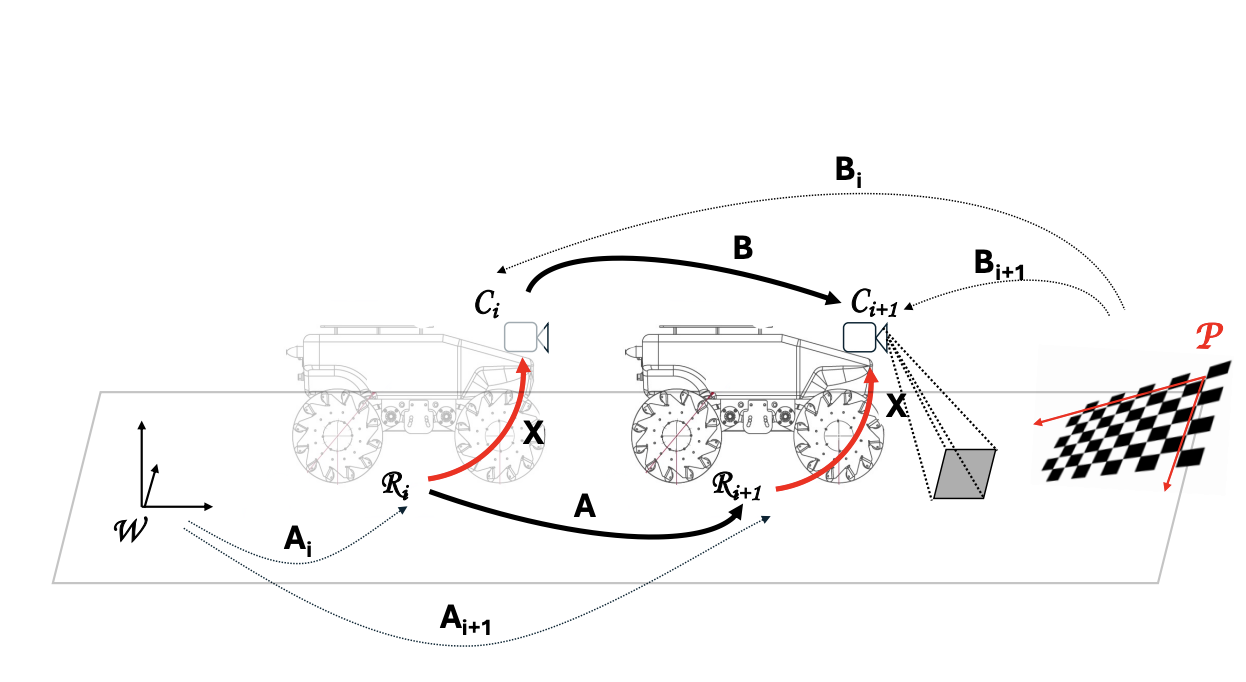
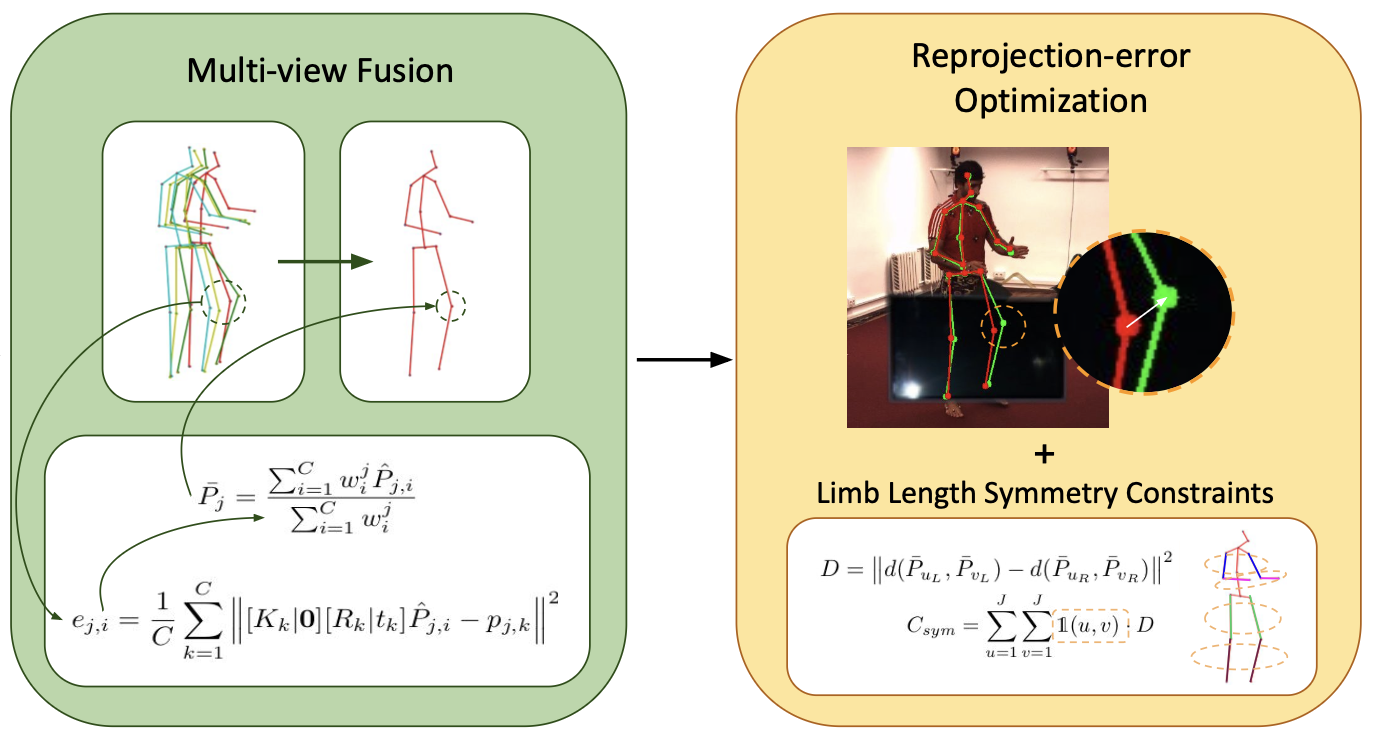
My research focuses on active mapping of dynamic objects and 3D reconstruction. I have worked on multi-camera calibration for human-robot collaboration.